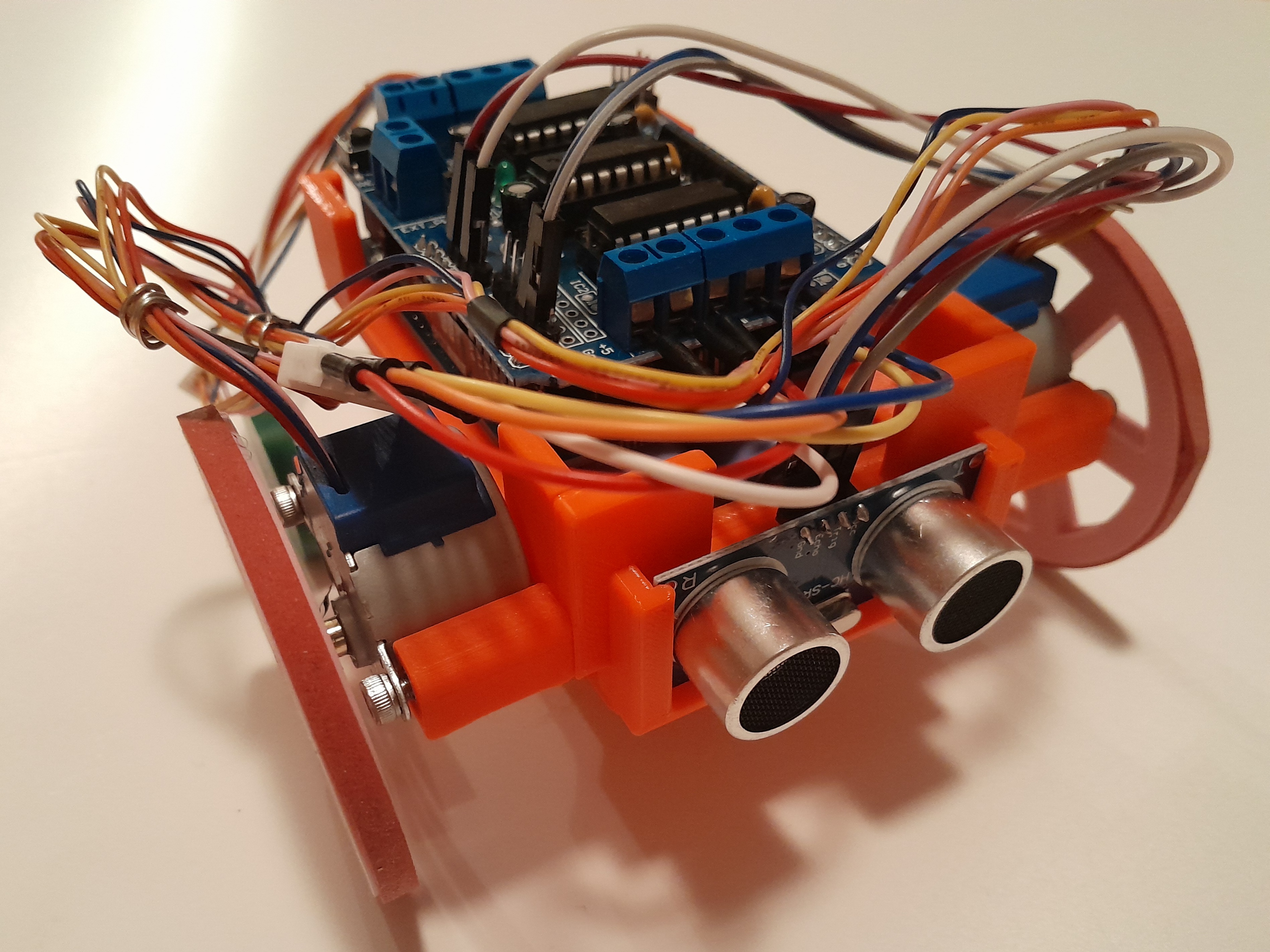
Neptun ist ein autonomer Mini-Roboter mit moderner Technologie.
Der Roboter wird von zwei großen Vorderrädern angetrieben und von zwei kleineren Hinterrädern abgestützt. Durch Sensorik findet er sich überall zurecht und hält sich von Hindernissen fern. Er basiert auf einem Arduino, programmiert in C++. Der Antrieb besteht aus zwei Stepper-Motoren, die über ein Motorshield mit dem Arduino verknüpft sind. Zur Hinderniserkennung werden Ultraschallsensoren verwendet (die 'Augen' vorne). Zwei Batterien im Rumpf des Roboters versorgen ihn stetig mit Strom. Um mehr Bodenhaftung zu erreichen, wurden Gummiaufzüge an den Reifen angebracht.Alle nicht elektronischen Teile wurden mit einem 3D-Drucker mit dem Material PLA gedruckt und modular miteinander verklebt. Die Motoren sind mithilfe von (in das Plastik eingeschmolzenen) Metallgewinden an das Gehäuse geschraubt.
Durch die modulare Bauweise sind ausfallbedingte Komponentenwechsel sehr einfach.
Die Idee für das Projekt Neptun als selbst navigierender Mini-Roboter etstand bereits Anfang 2024, jedoch war zunächst eine auf einem Luftkissen schwebende Maschine in Planung. Das aktuelle Konzept für Neptun entstand im Januar 2025, die finale Umsetzung erfolgte in den wochen darauf. Projekt Neptun wurde finanziell und betreuend durch den Leiter der 3d-Druck-AG der Albert-Einstein-Schule in Schwalbach am Taunus unterstützt.
Das Projekt ist noch in Arbeit. Der Meilenstein, den Roboter autonom fahren zu lassen, wurde bereits erreicht, weitere Funktionen folgen.
Geplant sind:
- Sprachsteuerung (Los! | Halt!) mithilfe eines KY-038 Schallsensors
- Objektsuche (nach Farbtönen) mithlfe eines TCS3200 Farbsensors